Information found at the Jupyter documentation pages left me a little confused. My first impression was that communication between frontend and kernel is performed through 3 ZeroMQ connections: Shell (Router-Dealer), IOPub (Publisher-Subscriber) and Stdin (Router-Dealer). Further reading of the docs mentioned other 2 connection channels, Control and Heartbeat, but there was less info about their roles and how to implement them.
Fortunately, a blog post by Andrew Gibiansky, the creator of the Haskell language kernel for IPython, clarified things.
Obviously some informations are outdated, as IPython is the predecessor of Jupyter, but the general architecture remained the same:
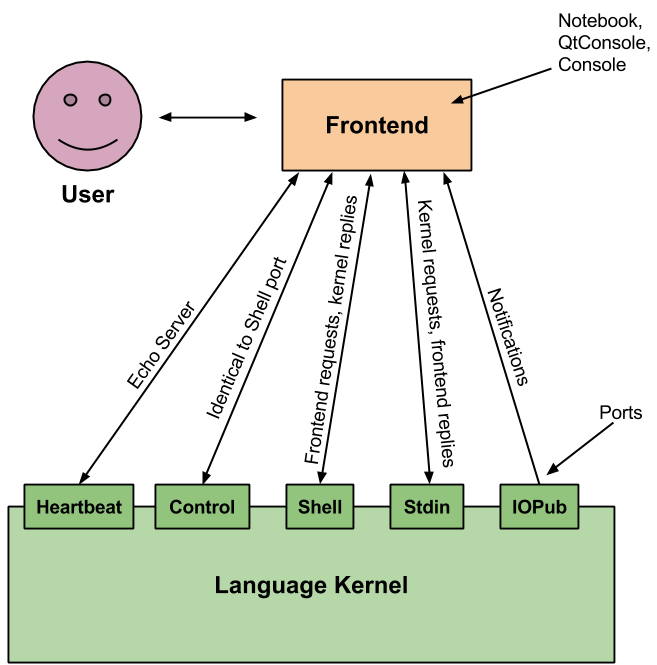
According to the article, the ZeroMQ socket types for each of those connections are the following:
- Heartbeat: Reply (Request on frontends)
- Shell, Control, Stdin: Router (Dealer on frontends)
- IOPub: Publisher (Subscriber on frontends)
Now that we got the general idea, let’s move to the implementation.
It’s pretty trivial to write the code to just instantiate the ZeroMQ connections, but there was some details I didn’t know.
As mentioned in the previous post, another IPython project, the simple_kernel.py by Doug Blank, gave me some insights about how to make things work: creating a separate thread for the Heartbeat socket guarantees that it answers immediately to the client requests (some kind of “Are you there yet ?” messages), keeping it aware that the backend is still running.
Thanks to the C++11 standard threads, thread creation and management in C++ can be done in a portable manner.
The kernel code that I have for now is shown below (and you can also see it on my GitHub repository). Obviously it is not functional, as this only create the required sockets and runs the Heartbeat thread:
#include <zmq.hpp> // ZeroMQ functions
#include <string>
#include <iostream>
#include <thread> // C++11 threads
#include <chrono> // C++11 time handling functions
#include <signal.h> // Signal handling functions
#ifndef _WIN32
#include <unistd.h>
#else
#include <windows.h>
#endif
// This should be "volatile" because of low-level
// CPU registers stuff. Let it be for now.
static volatile bool isRunning = true;
void HandleExitSignal( int dummy )
{
isRunning = false; // Self-explanatory enough
}
// Heartbeat thread function declaration
void HeartbeatLoopRun( zmq::context_t* );
int main( int argc, char* argv[] )
{
if( argc > 1 )
{
std::cout << "Reading connection file " << argv[ 1 ] << std::endl;
}
// Set interrupt function to be called when Ctrl^C is pressed
signal( SIGINT, HandleExitSignal );
// Every ZeroMQ application should create its own unique context
zmq::context_t context( 1 );
// Creating I/O Pub socket on arbitrary port
zmq::socket_t ioPubSocket( context, ZMQ_PUB );
ioPubSocket.bind( "tcp://*:50002" );
// Creating Control socket on arbitrary port
zmq::socket_t controlSocket( context, ZMQ_ROUTER );
controlSocket.bind( "tcp://*:50003" );
// Creating Stdin socket on arbitrary port
zmq::socket_t inputSocket( context, ZMQ_ROUTER );
inputSocket.bind( "tcp://*:50004" );
// Creating Shell socket on arbitrary port
zmq::socket_t shellSocket( context, ZMQ_ROUTER );
shellSocket.bind( "tcp://*:50005" );
// Run Heartbeat thread. Context is thread-safe, so we can safely pass it
std::thread heartbeatThread( HeartbeatLoopRun, &context );
while( isRunning ) // Run while we do not press Ctrl^C
{
// Let the Heartbeat thread do its job ( What a call !! )
std::this_thread::sleep_for( std::chrono::milliseconds( 1 ) );
}
heartbeatThread.join(); // Wait for the Heartbeat thread to return
return 0;
}
// Heartbeat thread function definition
void HeartbeatLoopRun( zmq::context_t* ptr_context )
{
// Creating Heartbeat socket on arbitrary port on its own thread
zmq::socket_t heartbeatSocket( *ptr_context, ZMQ_REP );
heartbeatSocket.bind( "tcp://*:50001" );
while( isRunning )
{
zmq::message_t ping; // We recreate message each time as "send" nullifies it
heartbeatSocket.recv( &ping ); // Client asks if kernel is still running
std::cout << "Received Heartbeat message: " << (char*) ping.data() << std::endl;
heartbeatSocket.send( ping ); // Answer immediately
}
}Having compiled the code, we setup the configuration files according to the Jupyter docs to call it from the console (Jupyter client) with:
$ jupyter console --debug --kernel scilabThe result we get is the following:
[ZMQTerminalIPythonApp] Searching ['/home/leonardojc', '/home/leonardojc/.jupyter', '/usr/etc/jupyter', '/usr/local/etc/jupyter', '/etc/jupyter'] for config files
[ZMQTerminalIPythonApp] Looking for jupyter_config in /etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_config in /usr/local/etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_config in /usr/etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_config in /home/leonardojc/.jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_config in /home/leonardojc
[ZMQTerminalIPythonApp] Looking for jupyter_console_config in /etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_console_config in /usr/local/etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_console_config in /usr/etc/jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_console_config in /home/leonardojc/.jupyter
[ZMQTerminalIPythonApp] Looking for jupyter_console_config in /home/leonardojc
[ZMQTerminalIPythonApp] Connection File not found: /run/user/1000/jupyter/kernel-27009.json
[ZMQTerminalIPythonApp] Found kernel scilab in /home/leonardojc/.local/share/jupyter/kernels
[ZMQTerminalIPythonApp] Native kernel (python3) available from /usr/lib/python3.5/site-packages/ipykernel/resources
[ZMQTerminalIPythonApp] Starting kernel: ['/home/leonardojc/.local/share/jupyter/kernels/Scilab/ScilabKernel', '/run/user/1000/jupyter/kernel-27009.json']
[ZMQTerminalIPythonApp] Connecting to: tcp://127.0.0.1:46095
Reading connection file /run/user/1000/jupyter/kernel-27009.json
[ZMQTerminalIPythonApp] connecting shell channel to tcp://127.0.0.1:51886
[ZMQTerminalIPythonApp] Connecting to: tcp://127.0.0.1:51886
[ZMQTerminalIPythonApp] connecting iopub channel to tcp://127.0.0.1:33016
[ZMQTerminalIPythonApp] Connecting to: tcp://127.0.0.1:33016
[ZMQTerminalIPythonApp] connecting stdin channel to tcp://127.0.0.1:36901
[ZMQTerminalIPythonApp] Connecting to: tcp://127.0.0.1:36901
[ZMQTerminalIPythonApp] connecting heartbeat channel to tcp://127.0.0.1:41229
Jupyter Console 4.1.1
[ZMQTerminalIPythonApp] Starting the jupyter console mainloop...As you can see, not even input is requested, and we can’t send an exit command, as I didn’t implement these things yet. But the kernel was correctly found and started.
You can see from the docs and the console output, there are .json configuration files being read. This involves an important aspect of Jupyter about which I’ll talk later.
That’s it for now. Thanks for reading and until next time !